
Wat is computer vision en wat zijn de uitdagingen in de wereld van zelfrijdende auto's?
Zelfrijdende auto's zijn een controversieel en fascinerend onderwerp, omdat ze gebruikmaken van geavanceerde bestuurdersassistentiesystemen (ADAS) om een hoog niveau van veiligheid en comfort te bereiken. Hoewel volledig zelfrijdende auto's nog niet bestaan, maken huidige technologieën functies als automatisch sturen en zelf parkeren mogelijk.
Deze auto's maken gebruik van geavanceerde computer vision-systemen om hun omgeving te analyseren en intelligente beslissingen te nemen, waarbij ze vertrouwen op diverse sensoren. In dit artikel bespreken we de basisbeginselen van computer vision en hoe dit de effectiviteit van geautomatiseerd rijden verbetert. Ook bespreken we de uitdagingen en toekomstige innovaties die op dit gebied te verwachten zijn.

Wat is computer vision?
Computer vision is een technologie waarmee machines objecten in hun omgeving kunnen zien en herkennen. Het is een onderdeel van visie dat zich richt op industriële toepassingen van visiegerichte objectdetectie in autonome machines, zoals robots en voertuigen.
Tegenwoordig wordt bij computer vision gebruikgemaakt van AI-algoritmen op basis van deep learning, zoals convolutionele neurale netwerken (CNN's). Daarmee worden robuuste, goed gegeneraliseerde modellen gemaakt die objecten onder verschillende omstandigheden nauwkeurig kunnen identificeren. Het maakt het mogelijk om machine vision te implementeren in uiteenlopende taken die een hogere betrouwbaarheid vereisen in de productie, landbouw, robotica en auto-industrie.
Hoe werkt computer vision in zelfrijdende auto's?
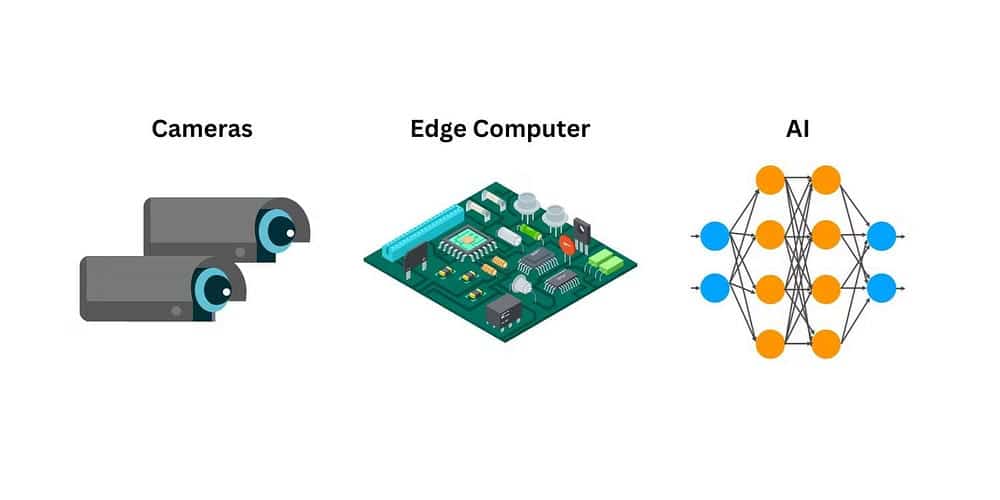
Computer vision in zelfrijdende auto's kan grofweg worden onderverdeeld in drie onderdelen: het camerasysteem, de verwerking (edge computing) en kunstmatige intelligentie. Dankzij deze technologie kunnen zelfrijdende auto's tijdens het rijden verschillende verkeersborden en obstakels zien, overwegen en identificeren. Laten we elk onderdeel diepgaand bespreken om te begrijpen hoe deze technologieën samenwerken om een machinaal zicht te creëren voor een zelfrijdende auto.
Camerasysteem
Computer vision maakt gebruik van camerasystemen om visuele informatie over de omgeving te verzamelen. Zelfrijdende auto's maken gebruik van meerdere camera's die rondom het voertuig zijn geïnstalleerd om zoveel mogelijk visuele informatie te verzamelen.
In machinevisiecamera's worden twee hoofdsensoren gebruikt: complementaire metaaloxide halfgeleiders (CMOS) en ladingsgekoppelde apparaten (CCD). Voor zelfrijdende auto's wordt vaak de voorkeur gegeven aan CMOS-technologie vanwege de hoge uitleessnelheid, krachtige elektronica en parallelle verwerkingsmogelijkheden, waardoor het de snelste sensor is. Oplossingen zoals verschillende verlichtingsmodi, digitaal nachtzicht en filters kunnen de CMOS-sensor helpen tijdens minder dan ideale lichtomstandigheden.
Bij zelfrijdende auto's worden camera's op bepaalde afstanden van elkaar geïnstalleerd om een stereoscopisch beeld te produceren. Stereoscopisch zicht is het vermogen om twee of meer visuele inputs te combineren, waardoor een gevoel van diepte of driedimensionaliteit in objecten en de omgeving ontstaat. Hierdoor kunnen auto's op hun beurt trianguleren en de geschatte afstand tussen het object en de auto berekenen.
Omdat mensen twee ogen hebben, hebben we ook profijt van stereoscopisch zicht. U kunt deze visie zelf testen; Sluit één oog en pak een klein voorwerp van je bureau. Plaats uw hand op de zijkant van het voorwerp en zorg ervoor dat de punt van het voorwerp zich op minimaal 5 cm afstand bevindt. Probeer eens een paar seconden te pauzeren en merk op hoe zeker u zich voelt met uw benadering. Probeer nu beide ogen te openen en kijk hoeveel beter uw gevoel voor diepte wordt.
Edge-computing
Edge computing is het proces waarbij informatieopslag en rekenkracht dichter bij het apparaat worden gebracht dat de gegevens genereert en dichter bij de gebruikers die ermee interacteren. Traditioneel verzenden applicaties gegevens van slimme apparaten, zoals sensoren en smartphones, naar een centraal datacentrum voor verwerking. De ongekende complexiteit en omvang van de data overtroffen echter de capaciteiten van het netwerk. Edge computing-systemen brengen verwerkingsmogelijkheden dichter bij gebruikers en apparaten, waardoor de applicatieprestaties aanzienlijk worden verbeterd, de vereisten voor netwerkbandbreedte worden verlaagd en er snellere, realtime inzichten worden geboden.
Terwijl het camerasysteem in de zelfrijdende auto gegevens verzamelt, verwerkt de boordcomputer (edge-processor) alle invoer in realtime. Zo wordt het systeem direct geüpdatet met de status van de omgeving. Hoewel bij typische computer vision-taken geld bespaard kan worden door gebruik te maken van cloud computing, kleven er voor zelfrijdende auto's simpelweg te veel risico's aan de cloud, zelfs als dat komt door het uitbesteden van het proces ten behoeve van machine vision.
Door een geavanceerde computer te gebruiken voor de verwerking van invoergegevens, worden latentieproblemen opgelost en weet u zeker dat gegevens in realtime worden ontvangen, verwerkt en verzonden. Geavanceerde computers voor zelfrijdende auto's maken gebruik van gespecialiseerde computers die AI-grafische processoren integreren, zoals NVIDIA's Tensor Core en CUDA Cores.
Algoritmen voor kunstmatige intelligentie
Algoritmes zijn altijd een belangrijk onderdeel van machine vision geweest. Het algoritme zorgt ervoor dat de computer alle patronen, vormen en kleuren herkent die het camerasysteem levert. Door kunstmatige intelligentie te gebruiken in plaats van traditionele algoritmen voor computer vision kan een zelfrijdende auto veel beter objecten, verkeersborden, wegmarkeringen en verkeerslichten identificeren. Er worden veel AI-algoritmen gebruikt om zelfrijdende auto's te trainen. De meest populaire zijn:
- YOLO (You Only Look Once): Een real-time objectdetectiealgoritme dat objecten in het gezichtsveld van de auto identificeert en volgt.
- ZIFTEN (Scale-Icar's Feature Conversion): Het wordt gebruikt om kenmerken te extraheren en helpt de auto onderscheidende oriëntatiepunten en objecten in zijn omgeving te herkennen.
- Histogram van gerichte gradiënten (HOG): Het wordt gebruikt voor objectherkenning en richt zich op het extraheren van lokale patronen en gradiënten uit afbeeldingen.
- TextonBoost: Een algoritme dat helpt bij het identificeren van objecten door texturen in de omgeving te analyseren.
- AdaBoost: AdaBoost wordt gebruikt om gegevens te classificeren en combineert verschillende zwakke classificaties om robuuste beslissingen te nemen over objecten en obstakels op het pad van een voertuig.
Het belang van computer vision in zelfrijdende auto's
Computer vision is de belangrijkste manier waarop een zelfrijdende auto zijn omgeving waarneemt en begrijpt. Zonder machinaal zicht worden zelfrijdende auto's waarschijnlijk naar niveau 1 op de schaal van voertuigautonomie verwezen en bereiken ze mogelijk nooit volledige autonomie.
Dankzij machine vision kunnen zelfrijdende auto’s nu objecten classificeren, rijstroken en signalen detecteren, borden identificeren en verkeer herkennen.
Hoewel veel zelfrijdende auto's tegenwoordig gebruikmaken van verschillende sensoren, zoals LIDAR, RADAR en SONAR, zijn ze allemaal sterk afhankelijk van computer vision om de omgeving te zien, objecten te identificeren en de betekenis van verkeersborden en verkeerslichten te begrijpen. Al deze extra sensoren zijn uitsluitend bedoeld om het machinezicht te verbeteren en de veiligheid van mensen, dieren en eigendommen te vergroten.
Machine vision kan echter autonoom werken zonder de hulp van andere sensoren, waardoor automatische besturingsmogelijkheden worden geboden. In feite hebben Tesla's nieuwste zelfrijdende auto's het radarsysteem achter zich gelaten en vertrouwen ze nu uitsluitend op de machinevisie van het Autopilot-systeem.
Hoewel dit niet per se het nut van andere sensortechnologieën in twijfel trekt, toont het wel het belang en de kracht van computer vision in zelfrijdende auto's aan.
veelgestelde vragen
Vraag 1. Wat is computer vision-technologie? In zelfrijdende auto's?
Computer vision-technologie is een hardware- en softwaregebaseerd systeem dat beelden en video's analyseert en interpreteert, zodat zelfrijdende auto's hun omgeving kunnen herkennen en beslissingen kunnen nemen tijdens het rijden.
Vraag 2. Hoe computer vision-technologie werkt In auto's?
De auto is uitgerust met meerdere camera's en sensoren die beelden en video's van de omgeving vastleggen. Deze gegevens worden verwerkt met behulp van geavanceerde software om beelden te analyseren en verschillende objecten en oriëntatiepunten op de weg te herkennen.
Vraag 3. Wat is het belang van computer vision-technologie? Zelfrijdend?
Computer vision-technologie is essentieel voor autonoom rijden, omdat het systeem hiermee verkeersborden, andere voertuigen en obstakels op de weg kan herkennen. Deze actuele informatie vormt de basis voor geautomatiseerde besluitvorming, waaronder voertuigbesturing en ongevalspreventie.
Q4. Wat zijn de uitdagingen waarmee machine vision-technologie wordt geconfronteerd?
Uitdagingen voor computer vision-technologie zijn onder andere factoren als ongunstige weersomstandigheden zoals mist en regen, moeite met het herkennen van objecten in volledige duisternis, en gegevensbescherming en privacy.
Vraag 5. Wat zijn de verwachte toekomstige ontwikkelingen op dit gebied?
Verwacht wordt dat de technologie voor computer vision zich blijft ontwikkelen, met betere toepassingen van kunstmatige intelligentie en verbeterde mogelijkheden voor sensortechnologie en beeldherkenning. Het is ook mogelijk om deze technologie uit te breiden naar andere gebieden dan auto's.
De toekomst van machine vision in zelfrijdende auto’s
Computer vision is de basis van zelfrijdende auto's. Dankzij machine vision kunnen auto's de omgeving zien en waarnemen, net als mensen. Hoewel er nog steeds uitdagingen bestaan, mogen de voordelen van computer vision op het gebied van veiligheid en navigatie niet worden onderschat. Wat de toekomst van zelfrijdende auto's betreft, zullen verdere ontwikkelingen op het gebied van kunstmatige intelligentie, edge computing en/of cameratechnologie ervoor zorgen dat zelfrijdende auto's efficiënter worden, wat ze waarschijnlijk naar een hoger niveau van automatisering zal brengen.
Reacties zijn gesloten.